全國(guó)免費(fèi)咨詢電話:400-811-7869

實(shí)際運(yùn)行的球磨機(jī)設(shè)備,因社會(huì)需要當(dāng)下所應(yīng)用的控制方案與以往的控制系統(tǒng)有一定的差別,具體表現(xiàn)在:
1、原有的控制方案:
較初球磨機(jī)安裝的控制系統(tǒng)為基于調(diào)節(jié)控制的標(biāo)準(zhǔn)PID控制系統(tǒng),對(duì)磨機(jī)新給礦、給水量實(shí)施按比例操控。新給礦量則由控制室操作者控制,而磨機(jī)負(fù)荷、磨機(jī)功率的保護(hù),能不經(jīng)操作者而直接關(guān)停磨機(jī),以此應(yīng)對(duì)過負(fù)荷現(xiàn)象,并對(duì)球磨機(jī)起到保護(hù)作用。
兩臺(tái)球磨機(jī)采用基礎(chǔ)調(diào)節(jié)控制運(yùn)行時(shí),當(dāng)磨機(jī)達(dá)到額定磨機(jī)負(fù)荷時(shí),會(huì)產(chǎn)生運(yùn)行時(shí)間的損失,并引起暫停給礦,以促進(jìn)充分磨礦,并減弱負(fù)荷。此種運(yùn)轉(zhuǎn)模式帶來的重大動(dòng)力學(xué)干擾,會(huì)不受影響的一直傳遞到后續(xù)的第二段磨礦和浮選回路。
2、新采用的控制方案:
新的控制方案設(shè)計(jì)了一個(gè)先進(jìn)的控制模型——多變量調(diào)節(jié)控制系統(tǒng)采用古典的控制技術(shù),在現(xiàn)有的球磨機(jī)控制PLC系統(tǒng)中實(shí)施。設(shè)計(jì)新的控制方案其目的是為了令球磨機(jī)的給礦量控制完全自動(dòng)化,提高磨機(jī)的利用率,促使球磨機(jī)一直處于特定磨礦限定條件下。此磨礦限定條件有給礦量、有效磨機(jī)功率、較大的球磨機(jī)負(fù)荷和等同于磨礦功率峰值的磨機(jī)負(fù)荷估算值。
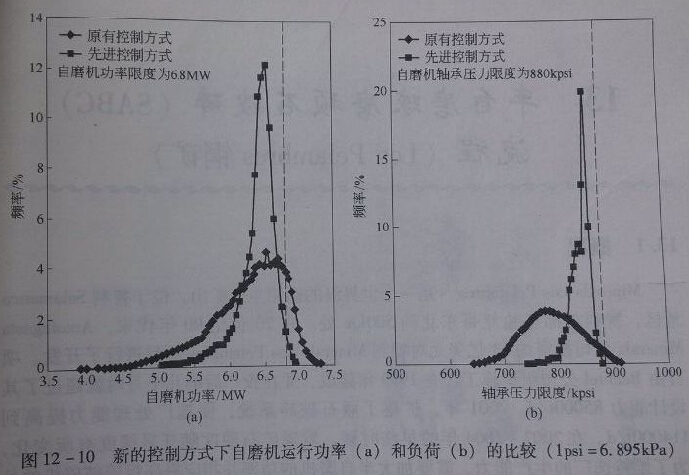
另外新的控制方案很大程度上減弱了頻繁的暫停給礦,達(dá)到了球磨機(jī)“充分磨礦”的需求,與控制球磨機(jī)的多個(gè)限定條件相比還是有限的,盡管只是控制了磨機(jī)的新給礦量。圖12-10所示為在采用簡(jiǎn)單的調(diào)節(jié)控制和先進(jìn)的變量控制模型條件下對(duì)球磨機(jī)功率和磨機(jī)負(fù)荷利用的性能比較情況。同時(shí)還可以說明,采用先進(jìn)的控制方式,控制更嚴(yán)謹(jǐn),也更接近于限定條件的限度,球磨機(jī)的平均處理能力增加了50t/h。
文章來自:http://m.qunhuxitong.com.cn/